About
I am a Senior Robotics Researcher at Omron Research Center of America in California, USA. I completed my Ph.D. in Mechanical and Aerospace Engineering at Rutgers University in 2019 under the supervision of Prof. Xiaoli Bai.
My interests include autonomy; guidance, navigation, and control; robotics; optimization; aerospace systems; and control theory.
Before coming to Rutgers, I received an MS in Aerospace Engineering from New Mexico State University in 2015.
I completed my bachelor’s thesis at the French Space Agency (CNES) in Toulouse, France, under Jean-Yves Prado, on asteroid hazard mitigation. I then worked as a visiting researcher at the Institut de Mécanique Céleste et de Calcul des Éphémérides (IMCCE), Paris Observatory, with Dr. Florent Deleflie. I also did a summer internship at the Institute of Space Systems, German Aerospace Center (DLR) in Bremen, Germany.
Prior to graduate studies, I spent some memorable years at BITS Pilani in India, where I double-majored in Electronics & Instrumentation Engineering and Economics.
Research
I work on autonomy for aerospace and robotic systems, with expertise in guidance, navigation, and control; motion planning; nonlinear and optimal control; trajectory optimization; and model predictive control for complex, safety-critical systems. My current work focuses on perception, planning, and control for ground, aerial, and space robotics, especially autonomous space systems, human-robot collaboration and multi-robot systems in the field. During my Ph.D., I developed convex-optimization-based methods for trajectory planning and control, applied to space robotics and autonomous aircraft carrier landing.
Research Highlights
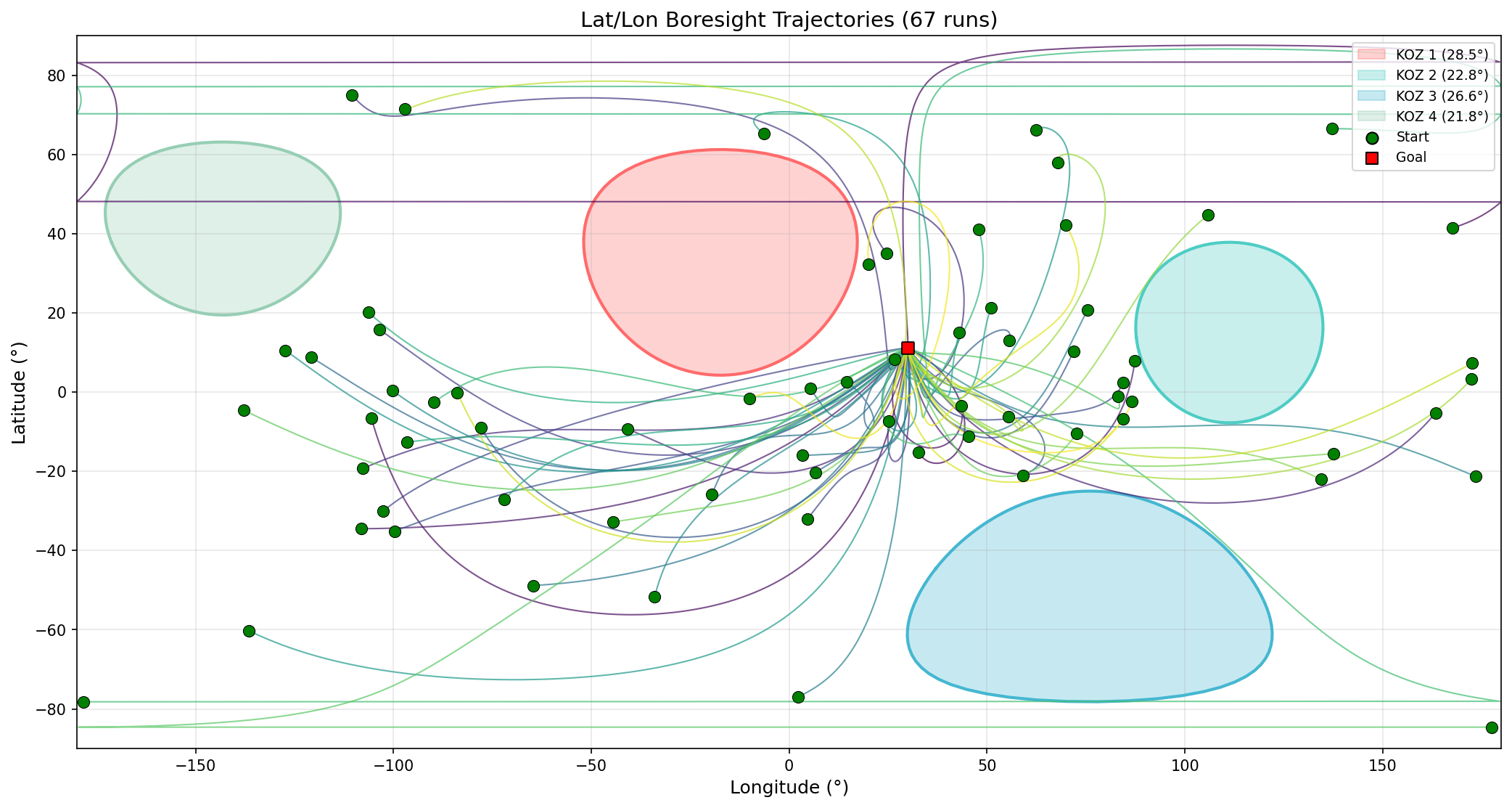
Using sum-of-squares programming, the attitude path planning problem on SO(3) is posed as a semidefinite program with guaranteed constraint satisfaction (including static or moving keep-out or field-of-view zones) throughout the attitude path—without combinatorial branching or temporal discretization. [Coming soon]
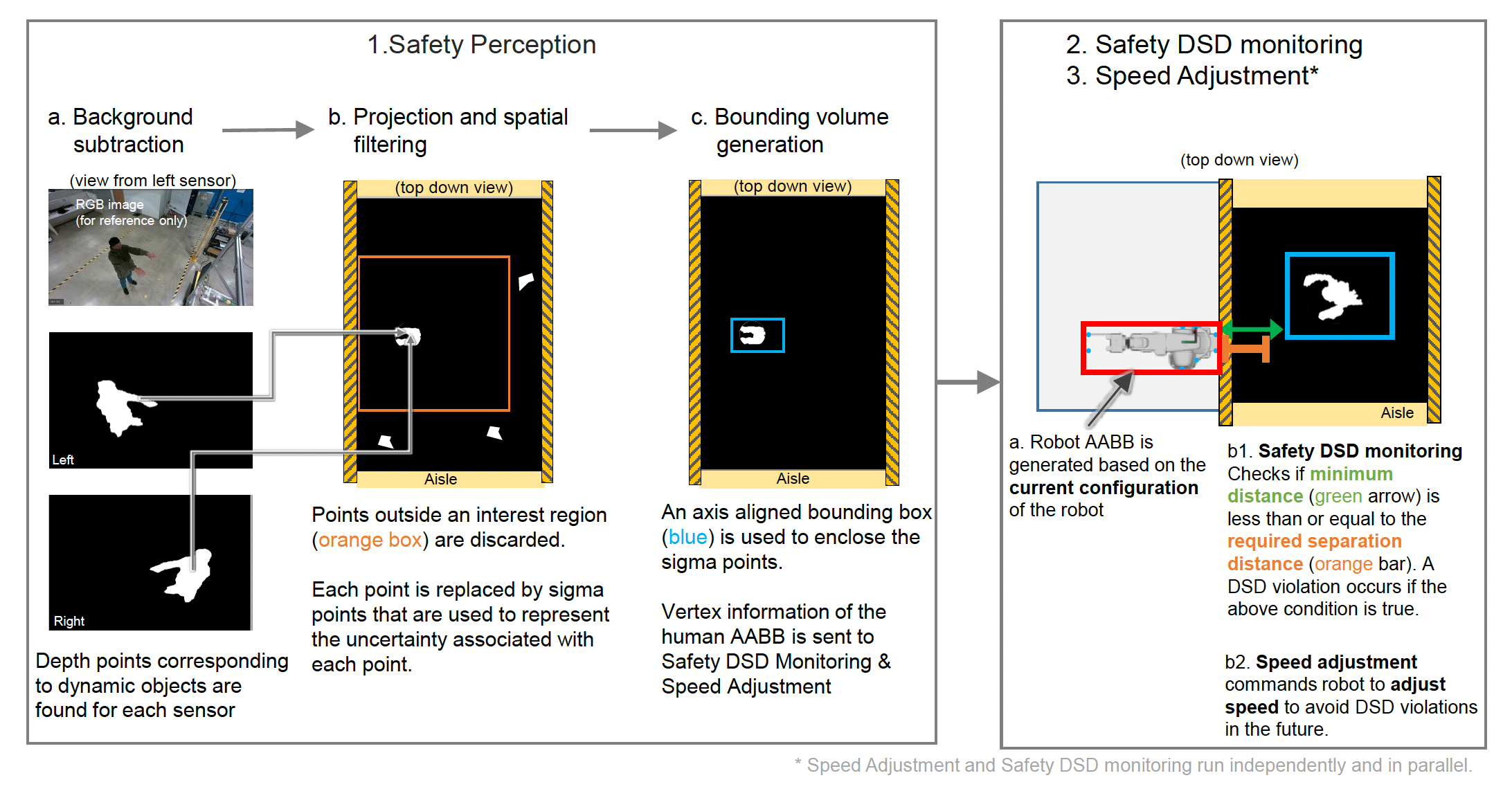
Using 3D safety sensors to enable close proximity between humans and high-speed industrial robots. 3D active stereo/Lidar sensors provide real-time position of humans (and robot), the robot speed is scaled based on the tractable real-time generated, geometric primitives while adhreing to requirements in ISO 13855, ISO 10218-1/2.
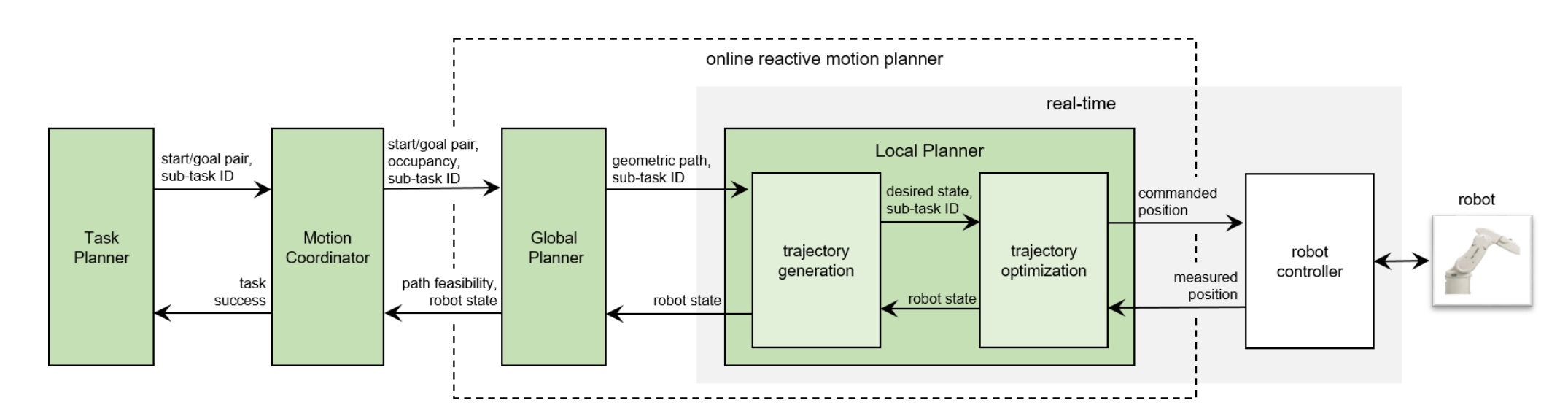
Task/sub-task decomposition based on application needs, paired with a hybrid motion planner using dynamic roadmaps for global planning and a QP-based trajectory optimizer for local planning.
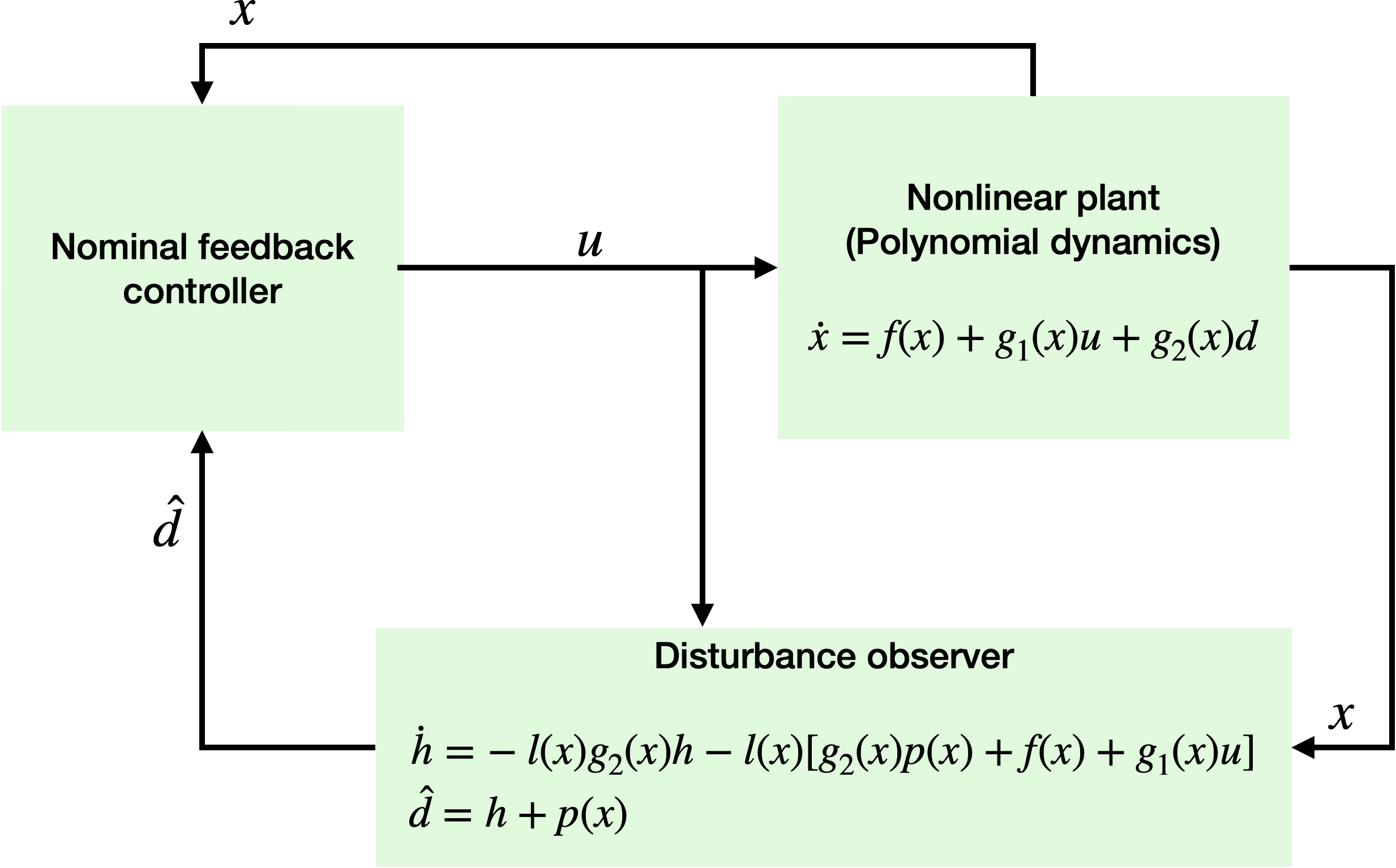
Disturbance observer design for polynomial systems with potentially mismatched uncertainties posed as a polynomial matrix inequality (PMI). PMIs can be converted to sum-of-squares programs and solved efficiently via SDP solvers. Applied to nonlinear relative spacecraft attitude tracking with disturbance torques on both the chaser and an uncooperative tumbling target spacecraft (Misra & Bai, JGCD 2020).
Non-convex inequality constraints are modeled using difference-of-convex (DC) decomposition, where the decomposition is posed as a sum-of-squares optimization. Applied to Clohessy–Hill–Wiltshire (CHW)-based guidance with non-convex path constraints and anytime feasibility under mild conditions (Misra & Bai, AIAA SciTech 2020).
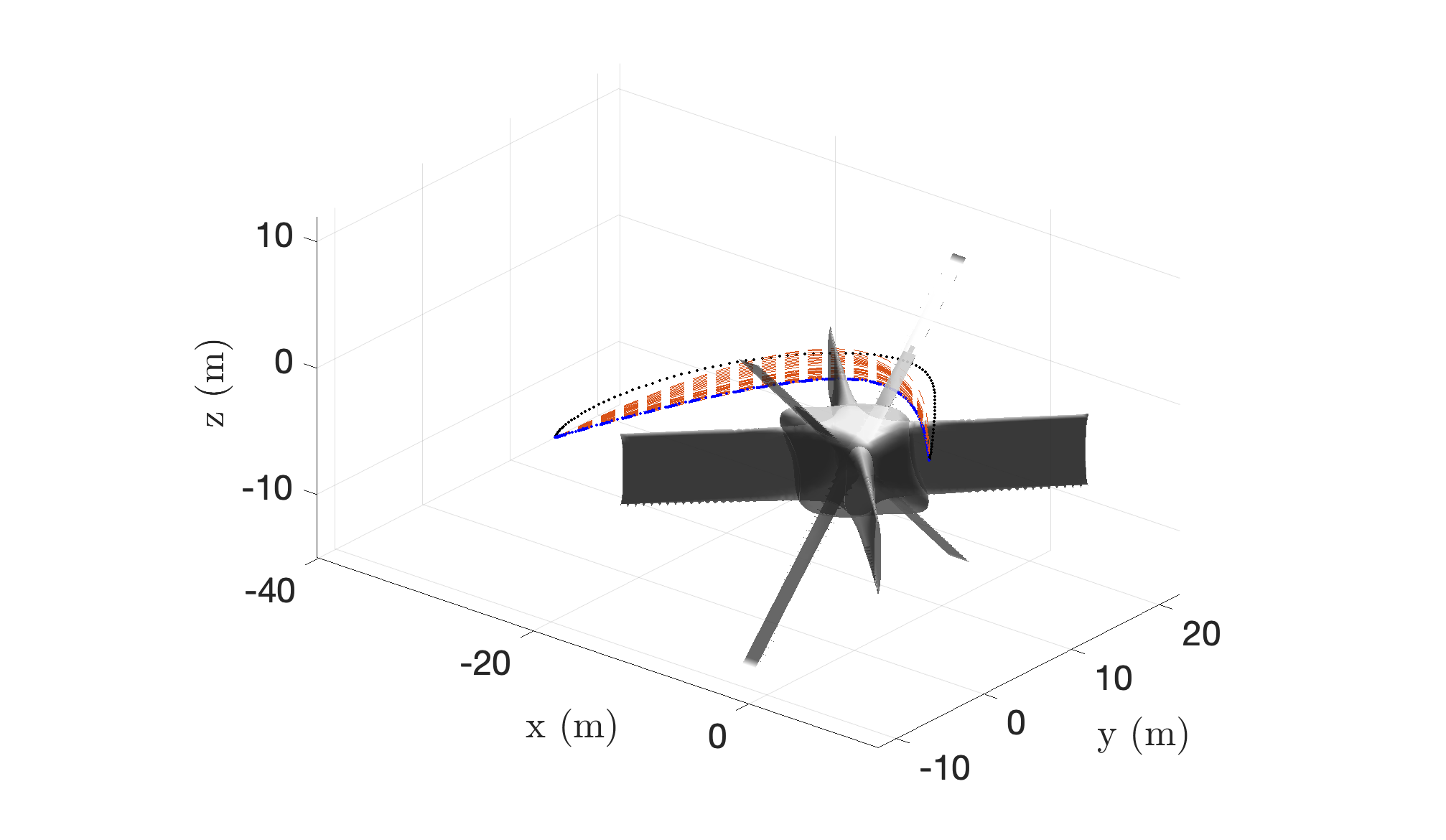
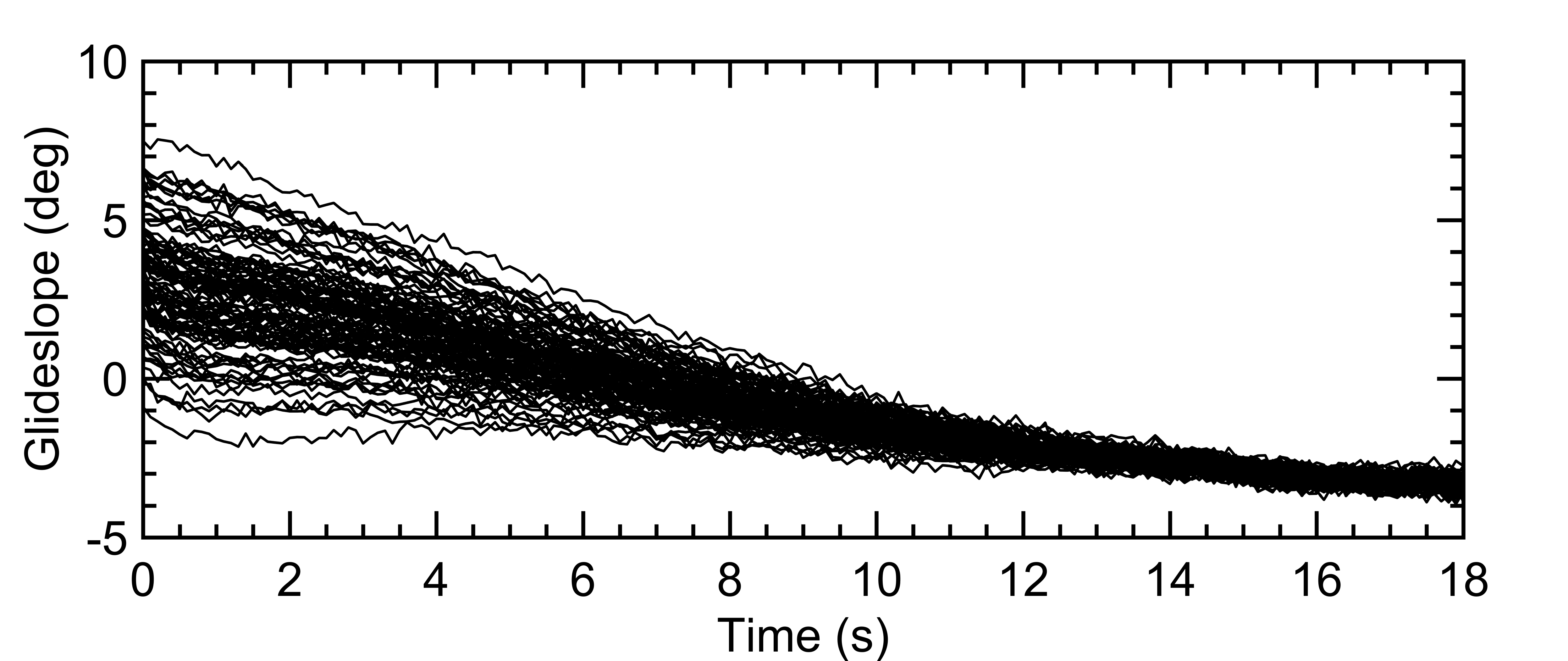
Output-feedback stochastic MPC attenuates carrier airwake and turbulence, achieving tight glideslope tracking in Monte Carlo trials (Misra & Bai, JGCD 2019).

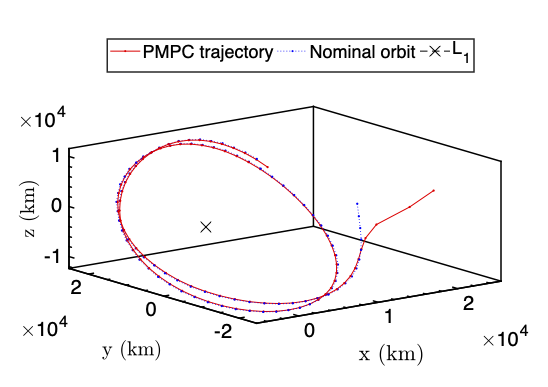
Polynomial-optimization-based MPC for spacecraft stationkeeping near Lagrange points using polynomial approximation of circular restricted three-body problem dynamics (Misra, Peng & Bai, AIAA SciTech 2018).
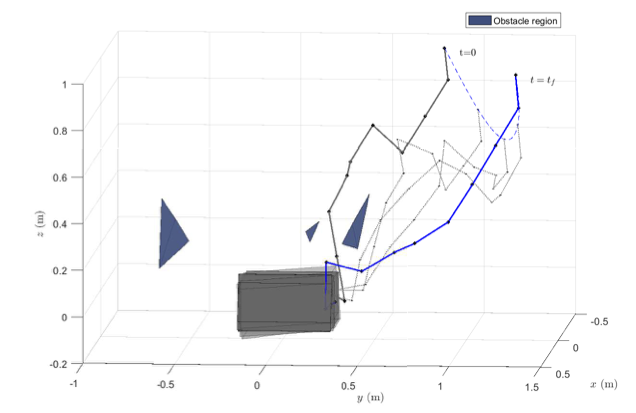
Task-constrained trajectory planning cast as a convex QP, enabling rapid trajectory generation for a 10-DOF free-floating arm (Misra & Bai, JGCD 2017).
Publications
See Google Scholar for the full list.
Service
Professional Service
- Conference Reviewer: AIAA Scitech, ICRA, ACC, CASE, AIM, IEEE UR
- Journal Reviewer: AIAA Journal of Guidance, Control, and Dynamics; IEEE Robotics and Automation Letters; Acta Astronautica; IEEE Transactions on Aerospace and Electronic Systems; AIAA Journal of Spacecraft and Rockets; Control Engineering Practice; Aerospace Science and Technology
Patents
Code
Some (not regularly updated) code on GitHub. These repositories are primarily for learning and demonstration; they are not optimized, maintained, or intended for production use.